{kind=link}
alt text
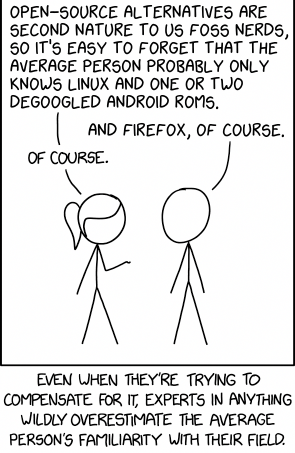
An edit of xkcd 2501, “Average Familiarity”:
[Ponytail and Cueball are talking. Ponytail has her hand raised, palm up, towards Cueball.]
Ponytail: Open-source alternatives are second nature to us foss nerds, so it’s easy to forget that the average person probably only knows Linux and one or two degoogled Android ROMs.
Cueball: And Firefox, of course.
Ponytail: Of course.
[Caption below the panel]
Even when they’re trying to compensate for it, experts in anything wildly overestimate the average person’s familiarity with their field.
partly inspired by the replies to this post but i see this kind of thing all the time (shoutout to the person who once genuinely asked “who still uses google these days?”)
made with this neat tool
The Fast-MBysoon Project
Fast-MBysoon (Microkernel-Based YAML Synchronisation Object Notifier) is an ultra-low-latency middleware layer designed for distributed industrial robotics.
In high-stakes environments—like automated assembly lines or autonomous warehouse swarms—different hardware modules need to share state updates without the overhead of a bloated OS. Fast-MBysoon treats system configurations and sensor states as YAML-defined Synchronization Objects.
By operating on a microkernel architecture, it ensures that when one robot arm’s “Object” (e.g.,
current_velocity) changes, every other node in the cluster is notified with nanosecond precision, bypassing traditional networking stacks.Core Architecture
The system relies on a “Pub-Sub” model where the microkernel acts as a high-speed traffic controller for YAML-serialized state blobs.
Abstract Pseudo-Code
The following represents the high-level logic of the Fast-MBysoon kernel loop and a typical client interaction.
1. The Microkernel Dispatcher
This runs in the privileged ring of the microkernel, managing memory gates.
# Kernel Space: The "MBysoon" Heartbeat function KERNEL_SYNC_DISPATCHER(): while true: # Wait for a hardware interrupt from a Node event = WAIT_FOR_INTERRUPT() if event.type == "OBJECT_UPDATE": # Identify the YAML object being changed target_obj = Registry.lookup(event.object_id) # Validate the new YAML schema against the blueprint if VALIDATE_SCHEMA(event.payload, target_obj.blueprint): # Atomic swap of the object in shared memory ATOMIC_COMMIT(target_obj.memory_address, event.payload) # Notify all subscribers via direct kernel signal for subscriber in target_obj.subscribers: SIGNAL_THREAD(subscriber.thread_id, "STATE_CHANGED")2. The Client-Side Implementation
This is how a robotic “Gripper” module would interact with the “Arm” module’s state.
# User Space: Robotic Gripper Node import MBysoon_Client as mb def ON_ARM_MOVE(new_state_yaml): # Logic to adjust gripper pressure based on arm speed speed = new_state_yaml['velocity']['vector_sum'] if speed > 5.0: ACTUATE_GRIP_STRENGTH("HIGH") # Initialization # 1. Map the remote "Arm_Status" object to local memory arm_status = mb.subscribe("industrial_cluster/arm_01/status.yaml") # 2. Assign the callback for notifications arm_status.on_update(ON_ARM_MOVE) # 3. Execution loop while system_running: # The MBysoon kernel handles the heavy lifting # This thread sleeps until the Notifier wakes it up mb.AWAIT_NOTIFICATION()Why “YAML”?
While binary formats are faster, Fast-MBysoon uses a pre-compiled “YAML-Binary” hybrid. This allows engineers to write human-readable configurations for complex robotic behaviors that are “baked” into the microkernel at boot time, combining developer-friendly syntax with machine-speed execution.